欢迎访问瑞昌明盛自动化设备有限公司网站!

专注中国工业自动化领域
让消费者采购到物美价廉的工业品

全国订购热线:
+86 15270269218E-mail:stodcdcs@gmail.com
您的浏览器版本过低,为保证更佳的浏览体验,请点击更新高版本浏览器
以后再说X欢迎访问瑞昌明盛自动化设备有限公司网站!
专注中国工业自动化领域
让消费者采购到物美价廉的工业品
全国订购热线:
+86 15270269218E-mail:stodcdcs@gmail.com





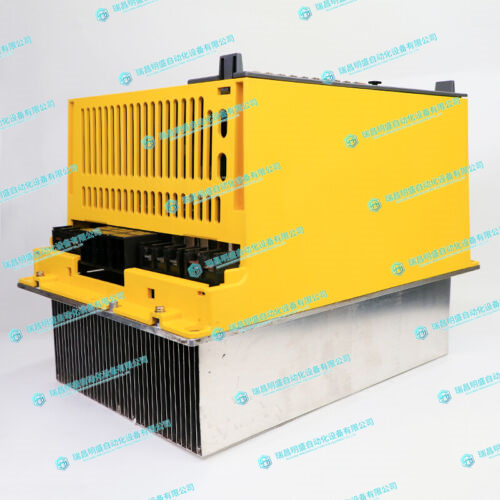
FANUC A06B-6105-H002机器人伺服放大器在从站侧,通过看门狗控制与主站的通信。如果在看门狗控制间隔内没有与主设备进行数据通信,则从设备自动将其输出切换到故障安全状态。另请参阅第70页“多主机系统”中的“连接错误”。在多主机系统中,多个主机连接到一条总线。它们要么表示独立的子系统,包括
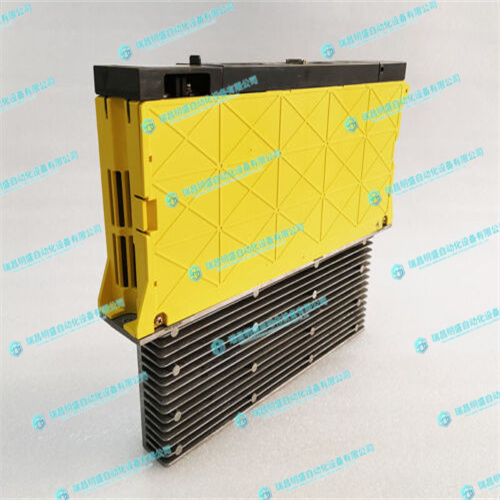
FANUC A06B-6164-H333驱动器以同样的方式,冻结命令使寻址的从设备进入冻结模式。在此模式下,输入的状态被冻结在其当前值。在主设备发送下一个冻结命令之前,不会再次更新输入数据。使用“解冻”命令终止冻结模式。CI854/CI854A不支持同步和冻结模式。监控DP-V0通信DPM1和从设备

FANUC A02B-0303-C205位置检测接口单元DPM1随后切换到清除状态。如果此参数被禁用,则DPM1即使在发生故障时也保持在操作状态,用户可以控制系统的反应。另请参阅第49页的设置选项卡。同步和冻结模式除了DPM1(DP Master Class 1)和分配的从设备之间的正常循环通信外,

FANUC A06B-6240-H209主轴驱动器DP主级2用于工程和配置。它不具有与从设备的循环数据传输。通常,DPM2仅临时连接到总线。DPM2可以在通过DPM1配置从属设备之前与从属设备进行2类通信,并且循环通信是活动的。系统行为对于DPM1主机,定义了以下操作状态:停止DPM1和从机之间的无
FANUC A06B-6081-H106伺服控制器CI854/CI854A支持PROFIBUS DP-V0诊断的操作。从从设备传输到主设备的诊断数据由CI854/CI854A映射到PROFIBUS从设备或相关I/O设备的设备状态,并在特定设备的Control Builder M中的UnitStatu

FANUC A06B-6116-H011机器人电源模块CI854/CI854A支持PROFIBUS DP-V0诊断的操作。从从设备传输到主设备的诊断数据由CI854/CI854A映射到PROFIBUS从设备或相关I/O设备的设备状态,并在特定设备的Control Builder M中的UnitSta
 客服
客服
