欢迎访问瑞昌明盛自动化设备有限公司网站!

专注中国工业自动化领域
让消费者采购到物美价廉的工业品

全国订购热线:
+86 15270269218E-mail:stodcdcs@gmail.com
您的浏览器版本过低,为保证更佳的浏览体验,请点击更新高版本浏览器
以后再说X欢迎访问瑞昌明盛自动化设备有限公司网站!
专注中国工业自动化领域
让消费者采购到物美价廉的工业品
全国订购热线:
+86 15270269218E-mail:stodcdcs@gmail.com




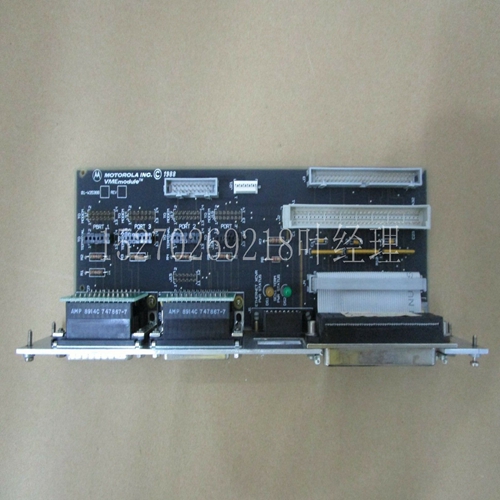
MVME162-723机器人模块卡件称重约规格变化摘要本包含下表所示的新信息和更新信息。环境规范本表为页面提供了符合性声明证书和其他认证详细信息的环境规范。根据和第号标准,危险场所使用的列出的工业控制设备额定值级,组外壳类型额定值符合和寿命至半亮度时小时分钟背光功耗典型触摸屏模拟电阻驱动额定值万次按

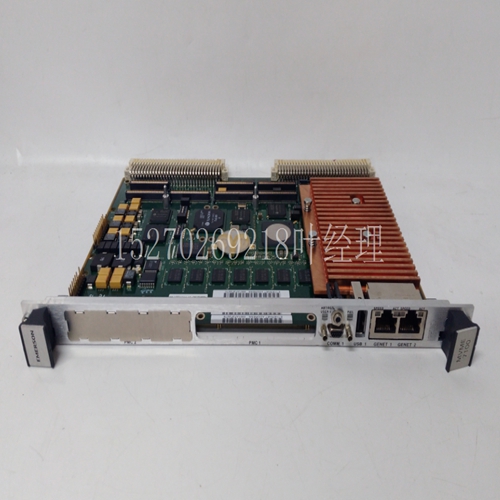
MVME162PA-242L机器人模块卡件四个可配置报警通知您指定的条件优点显示器和数据通信允许您集中记录数据并在本地显示需要安装的组件更少且尺寸紧凑,可帮助节省时间和空间显示器可帮助您使用实时数据即时准确的能源信息有助于降低运营成本易于配置的设备显示有助于简化安装与软件完全集成,形成一个完整的能源

MVME167-032B机器人模块卡件参见UL文件E65584。UL列出的2类D组危险场所认证适用于美国和加拿大。参见UL文件E194810.CE欧盟2004108EC EMC指令,符合:EN 61326-1;测量控制实验室。,工业要求EN 61000-6-2;工业抗扰度EN 61000-6-4;工

MVME167PA-34SE机器人模块卡件它们设计用于将电机轴保持在0 rpm,以达到额定制动保持扭矩。按照以下步骤防止电机轴旋转。1.命令伺服驱动至0 rpm。2.确认电机转速为0 rpm。3.接合制动器。4.禁用驱动器。禁用驱动器可消除因伺服系统振荡轴而导致的制动器磨损的可能性。电缆进入电机下方
MVME172PA-644L机器人模块卡件EN 953:机械安全-防护结构的一般要求。EN 954-1:机械安全-控制系统的安全相关部件-第1部分:一般设计原则。EN 999:(标准草案)机械安全-根据人体各部分的接近速度定位防护设备。EN 1050:机械安全-风险评估。EN 1760-1:机械安全

MVME177P-66SE机器人模块卡件这必须解决此类释放的规模和影响,并进行更新,以纳入本篇第598.14节要求的报告;(vi)识别和评估设施泄漏、泄漏和释放的原因;(vii)符合本部分以及本篇第596和599部分的状态报告;(viii)根据本部分以及本篇第596和599部分的要求,必须保存并向部
 客服
客服
