







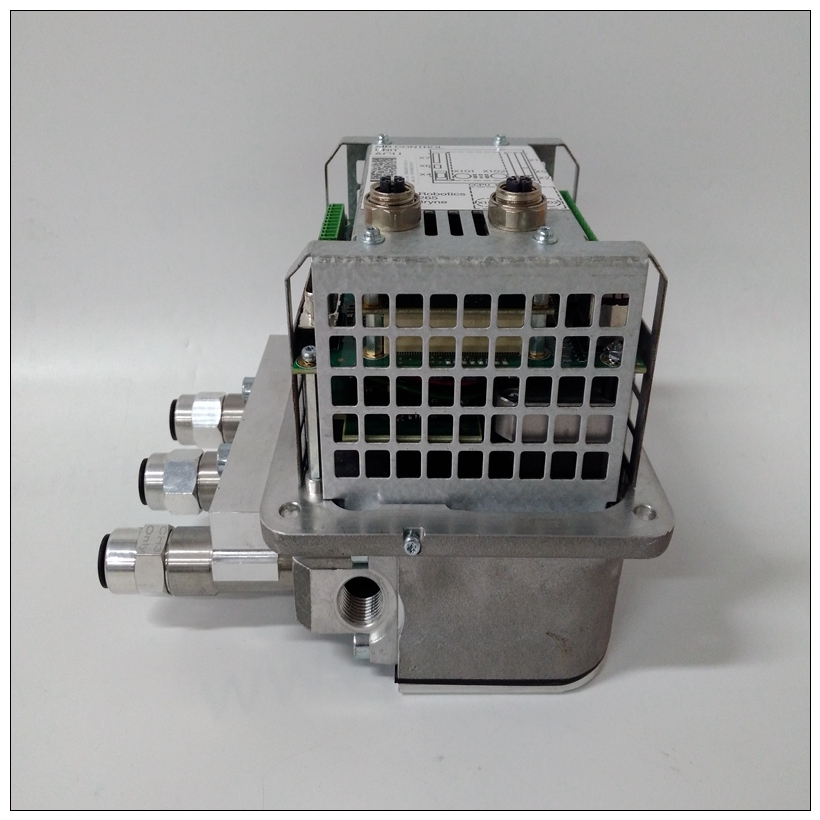
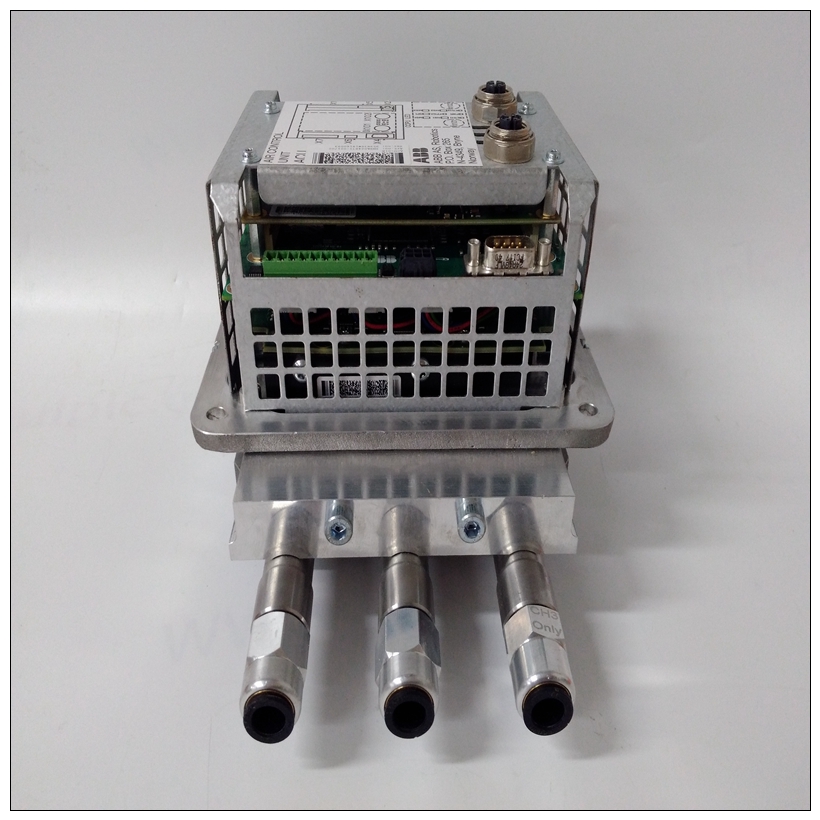
ACU-01B机器人模块,ABB使用在哪里
BH从指定的位置读取操作系统或控制程序然后将控制权返回到内存。它已被使用作为调试工具。通过187Bug系统调用进行磁盘输入/输出所有实际访问磁盘的操作都是直接或通过187Bug陷阱#496个系统调用间接实现。(指挥级磁盘操作提供了使用这些系统的方便方法调用而不编写和执行程序。)提供以下系统调用以允许用户程序磁盘输入/输出:请参阅摩托罗拉88K RISC CPU用户的调试包有关使用这些和其他系统调用的信息,请参阅手册。
")
ACU-01B机器人模块控制器命令包要执行磁盘操作,最终必须显示具有控制器命令的特定磁盘控制器模块专门为这种类型的控制器模块。(这是在各自的控制器驱动模块。).DSKRD磁盘读取。将块从磁盘读入的系统调用一种控制器模块的内存命令包通常会不同类型的命令包格式不同模块的。磁盘I/O接受通用(控制器独立)数据包格式作为参数,并将其转换为控制器特定的数据包,即然后发送到指定的设备。有关详细信息,请参阅调试包中的系统调用说明摩托罗拉88K RISC CPU用户手册,了解格式和
这些标准化“用户”数据包的构造。控制器模块预期提供的数据包各不相同从一个控制器到另一个控制器。的磁盘驱动程序模块特定硬件模块(板)必须采用标准化给陷阱函数的数据包,并创建一个新的数据包,该数据包是专门为发送到的磁盘驱动器控制器量身定制。参考有关特定控制器模块的文档其数据包的格式,并用于使用IOC命令。默认控制器和设备参数187Bug初始化默认配置的参数表控制器和设备(参考附录B)。如果系统需要此默认配置不同的配置(用于例如,使用70MB Winchester驱动器,其中默认值为40MB温彻斯特驱动器),则必须更改这些表。
BH reads an operating system or control program from a specified
device into memory, and then returns control to 187Bug. It is used
as a debugging tool.
Disk I/O via 187Bug System Calls
All operations that actually access the disk are done directly or
indirectly by 187Bug TRAP #496 system calls. (The command-level
disk operations provide a convenient way of using these system
calls without writing and executing a program.)
The following system calls are provided to allow user programs to
do disk I/O:
Refer to the Debugging Package for Motorola 88K RISC CPUs User's
Manual for information on using these and other system calls.
Controller Command Packets
To perform a disk operation, 187Bug must eventually present a
particular disk controller module with a controller command
packet which has been especially prepared for that type of
controller module. (This is accomplished in the respective
controller driver module.)
.DSKRD Disk read. System call to read blocks from a disk into
memoryA command packet for one type of controller module usually does
not have the same format as a command packet for a different type
of module. The system call facilities which do disk I/O accept a
generalized (controller-independent) packet format as an
argument, and translate it into a controller-specific packet, which is
then sent to the specified device.
Refer to the system call descriptions in the Debugging Package for
Motorola 88K RISC CPUs User's Manual for details on the format and
construction of these standardized "user" packets.
The packets which a controller module expects to be given vary
from controller to controller. The disk driver module for the
particular hardware module (board) must take the standardized
packet given to a trap function and create a new packet which is
specifically tailored for the disk drive controller it is sent to. Refer
to documentation on the particular controller module for the
format of its packets, and for using the IOC command.
Default 187Bug Controller and Device Parameters
187Bug initializes the parameter tables for a default configuration
of controllers and devices (refer to Appendix B). If the system needs
to be configured differently than this default configuration (for
example, to use a 70MB Winchester drive where the default is a
40MB Winchester drive), then these tables must be changed.

